Çizgi izleyen robot
bu günki yazımda sizlerle arduino ile hızlı çizgi izleyen robot yapacağız dilerseniz direk yapıma geçelim
ilk önce yapım dosyalarını atayım buraya tıklayarak indirebilirsiniz
Kullanılan parçalar
Qrd1114 sensör = zemine ışık gönderip dönen ışığa göre zeminin rengini algılıyor çalışma mantığı eğer zemin siyah renk ise sensörümüzün gönderdiği ışık karşıya vurup geri dönmez çünkü siyah ışığı emer fakat zemin beyaz ise gelen ışığı geri yansıtır ve zemin rengini ölçer sensöralgılama mesafesi 1 cm civarındadır ve zemine uzaklığına göre analog sinyal verir .
7404 = zemin sensöründen gelen analog bilgiyi işlemcinin daha kolay algılayabilmesi için 1 ve 0 hale döndürür yani ara değer vermeden zemin siyah ise çıkışa 5 volt zemin beyaz ise çıkışa 1 volt verir
12 volt 1500 rpm motor = çizgi takip edebilmek için gerekli hareketi sağlar
Zemine sıkı tutunan özel silikon teker = motorların hareketini zemine aktaran ve silikon yapısı ile kendini dışarı atmayan tekerler
Arduino nano = ana mikro kontrolcüdür 7404 entegresinden aldığı bilgileri kendi hafızasında derleyip motor sürücüye bilgi verir
Tb6612fng motor sürücü = motorların hareket alabilmesi için ve arduinoyu koruyabilmesi için (gücü arduinodan değilde direk pilden alması için ) bir sürücüdür.
3s lipo pil =sisteme ve motorlara gücü verecek devre elemanıdır devreye ters takılması halinde devre yanar kırmızı kabloyu + artı ya siyah kabloyu – eksiye takmak gerekir
Şase = ana sistemin üzerinde durabileceği zemin
Yapımı =
İlk önce robotta kullanılacak parçalar seçildikten sonra devre tasarımları ve şase çizimleri yapıldı ve gerekli parçaların siparişi verildi ardından parçalar gelene kadar yazılım halledildi ve parçalar geldikten sonra şase üzerine montajlanması yapıldı kodun çalışma mantığı ise qrd zemin sensörlerinden siyah ve beyaz renk bilgisi alınıyor 3 sensörden ortadaki sensör siyah görüyor ise robot düz gitmeye devam ediyor sağdaki sensör siyah çizgiyi gördüğünde robot çizgiden dışarıya (sola doğru gitiğini ) anlayıp sol motor hızını artırıyor ve robot burnunu düzeltmeye başlıyor aynı şekilde sol sensör siyah çizgiyi gördüğünde ise sağ motor hızını artırıyor ve robot burnunu düzeltiyor orta sensör her çizgide kaldığında motorlar tam hızda düz gidiyor.
Kullanımı=ilk önce beyaz zemin üzerine siyah renkli bant ile robotun gidebileceği düzgün bir pist oluşturuluyor ve düzgün bir şekilde döngüye sokuluyor ardından robot daha önce kullanıldı ise tekerleri kolonyalı mendil ile temizlenmesi gerekir. lipo pil devre kartına doğru bir şekilde bağlanıp (kart üzerinde + ve – pinlere doğru takılmalı aksi takdirte kart yanabilir)ardından robot beyaz zemine konuluyor ve çizgi takip işlemine başlıyor .
Yapım aşaması fotoğrafları =
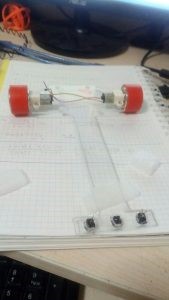
bilgisayar üzerinde çizmiş olduğumuz şase pleksi glass üzerine çizilip uygun dleik noktaları açılıyor


delikler açıldıktan sonra motor ve sensörler oturtuluyor

ardından elektronik devre elemanları şema ya uygun olarak delikli karta lehimleniyor


kart bağlantısı ve kablolama tamamlandıktan sonra yazılım robota aktarılıyor ve çalışmalar bitiyor


çalışma videosu aşağıdadır.
yazımı okuduğunuz için teşekkür ederim iyi çalışmalar